图结构最短路径算法概览
一句话总结
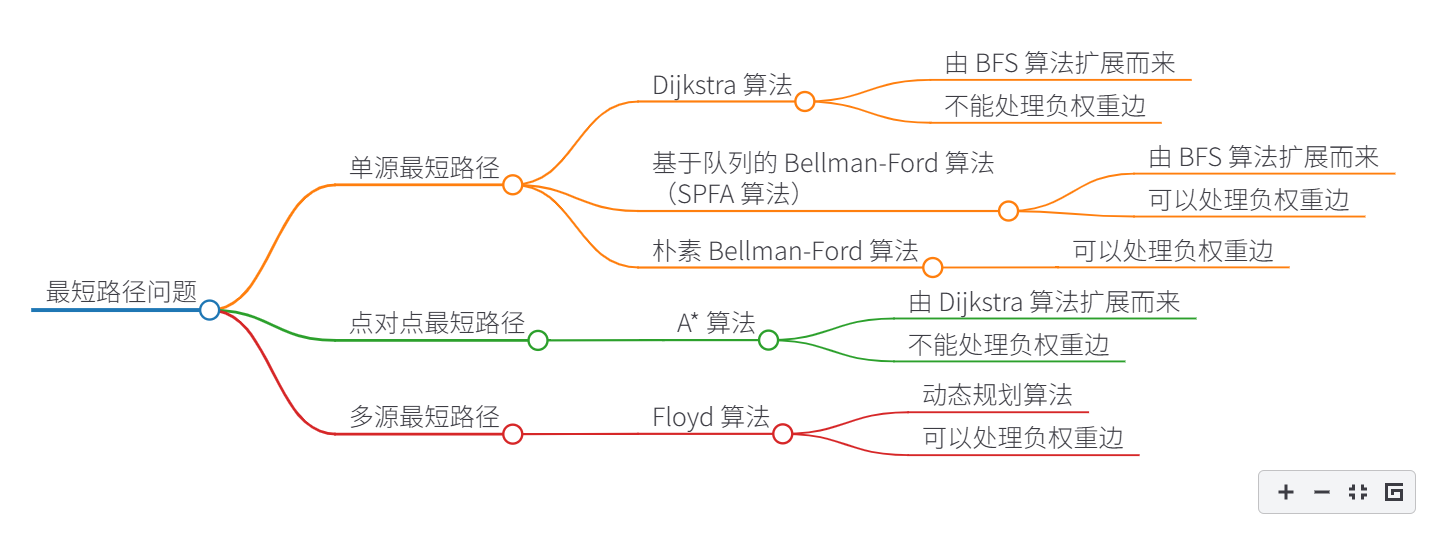
Dijkstra 算法和 A* 算法是 图的 BFS 遍历 的拓展,可以处理不包含负权重的单源最短路径问题。
SPFA 算法(基于队列的 Bellman-Ford 算法)是 图的 BFS 遍历 的拓展,可以处理包含负权重的单源最短路径问题。
Floyd 算法是 动态规划 的应用,可以处理多源最短路径问题。
初学者不要觉得图论算法有多难,因为它们都是基于简单的算法思想扩展出来的。你把基本的二叉树层序遍历玩明白,自己都能发明出来这些算法,没啥了不起的。
考虑到目前处在基础知识章节,所以本文并不会详细讲解每种算法的完整代码,具体的代码实现会安排在之后的章节。
本文的重点在这些算法的关键原理、适用场景,以及这些高级算法和基础知识的联系,帮助初学者对图结构的最短路径算法有一个整体的认识。
最短路径问题概览
最短路径问题在生活中应用广泛,比方说计算最小成本、最短路径长度、最少时间等。
在算法中,我们一般把这类问题抽象成计算 加权图 中的最小路径权重。为了方便表述,在本文中「最短路径」和「最小路径权重和」是等价的。
最短路径问题大致可以分为「单源最短路径」和「多源最短路径」两类,下面会介绍几个经典的算法。
单源最短路径
所谓单源最短路径,就是让你计算从某个起点出发,到其他所有顶点的最短路径。
比方说一幅图中有 n 个节点,编号为 0, 1, 2, ..., n-1,让你计算从 2 号节点到其他节点的最短路径,这就是单源最短路径问题。
单源最短路径算法最终得到的输出应该是一个一维数组 distTo,distTo[i] 表示从起点到节点 i 的最短路径长度。
比较有代表性的单源最短路径算法有:
1、Dijkstra 算法,其本质是 BFS 算法 + 贪心思想,效率较高,但是不能处理带有负权重的图。
2、基于队列的 Bellman-Ford 算法,其本质也是 BFS 算法,可以处理带有负权重的图,但效率比 Dijkstra 算法低。
点对点最短路径
很多算法题中不需要我们计算起点到所有其他节点的最短路径,仅需要计算从起点 src 到某一个目标节点 dst 的最短路径。这类问题可以称为点对点最短路径问题。
一般来说,点对点最短路径问题可以视为单源最短路径问题的特例,你可以从 src 开始执行单源最短路径算法,当算出到达 dst 的最短路径时提前结束算法。
但是下面将介绍一种专门处理点对点问题的算法:A* 算法(A Star Algorithm)。
我经常讲,算法的本质是穷举,你想要提高穷举的效率,就得尽可能充分地利用信息。点对点最短路径问题(已知起点和终点)比单源最短路径问题(已知起点)多了终点信息,所以完全有可能利用这个信息来提高算法的效率。
比方说,如果我们知道终点在起点的右下方,那么我们有理由猜测:应该优先向右下方搜索,可能可以更快地到达终点。
A* 算法的关键就在这里:它能够充分利用已知信息,有方向性地进行搜索,更快地找到终点。我们称这类算法为启发式搜索算法(Heuristic Search Algorithm)。
但是请注意,这个猜测只是经验法则,并不一定总是正确。比方说右下方可能都是死路,偏偏就得经过左上角绕个大弯才能到达终点。
所以启发式算法需要合理设置启发函数(Heuristic Function),在经验法则和实际情况中找到平衡,确保在经验法则失效时,算法的效率也不会太差。
多源最短路径
所谓多源最短路径,就是让你计算任意两节点之间的最短路径。
比方说一幅图中有 n 个节点,编号为 0, 1, 2, ..., n-1,让你计算所有节点之间的最短路径,这就是多源最短路径问题。
多源最短路径算法最终得到的输出应该是一个二维数组 dist,dist[i][j] 表示从节点 i 到节点 j 的最短路径长度。
最有代表性的是 Floyd 算法,其本质是动态规划算法。
理论上,我们对所有节点都调用一次单源最短路径算法,就可以得到多源最短路径的解。
但具体实现时,要根据图结构的特点来选择。有些场景用 Floyd 这种多源最短路径算法效率更高,有些场景多次调用 Dijkstra 这种单源最短路径算法效率更高。后面讲到这些算法的复杂度时,你就能理解了。
负权重边的影响
在计算最短路径时,需要着重注意的是这幅图是否包含负权重边;一旦包含负权重边,一定要检查是否包含负权重环。
为啥负权重边会影响最短路径算法呢?因为负权重边会让问题变得复杂。举个最简单的例子就能直观地理解了:
比方说我们现在站在起点 s 上,相邻节点有 a 和 b,s->a 权重为 3,s->b 权重为 4。
如果这幅图不存在负权重边,那么根据上述信息,我就已经可以确定 s 到 a 的最短路径是 s->a,权重和为 3。因为你从 s->b 这条路径走出去,绕一圈到达 a 的路径权重和肯定是大于 4 的,不可能比 3 还小。
但如果这幅图存在负权重边,那可就不一定了。因为可能出现负权重边呀,比方说 b->a 的权重为 -10,那么从 s->b->a 的路径权重和为 -6,比 s->a 的路径权重和 3 还小。
想让 Dijkstra 这类包含贪心思想的算法成立,需要一个前提:它假设随着经过的边的数量增加,路径权重和一定也会增加。但负权重边的出现打破了这一假设,导致算法失效。
如果图中存在负权重环,最短路径问题就没有意义了。比方说 s 到 a 的路径上存在负权重环,那么你可以在这个负权重环上无限转圈,使得路径权重和无限减小下去。
常见最短路径算法中,Dijkstra 算法和 A* 算法不能处理含有负权重边的图,Floyd 算法和 Bellman-Ford 算法可以处理负权重边,Bellman-Ford 算法常用来检测负权重环。
下面,我们介绍这些算法的核心原理。
Dijkstra 算法简介
Dijkstra 算法的本质就是 BFS 算法 + 贪心思路,可以解决不包含负权重的单源最短路径问题。
其实你可以很容易地直接从标准的 BFS 遍历出发,推演出 Dijkstra 算法的代码。来思考标准的 二叉树 BFS(层序)遍历 和 图的 BFS 遍历,为什么它们能算出最短路径?
因为它们的场景中都是无权边,可以认为每条边的权重都是 1,所以边的条数就等同于路径的权重和;由于 BFS 逐层扩散的逻辑,最先到达终点的路径经过的边数就是最少的,也就是路径权重和最小的路径。
现在考虑加权图,其中每条边可能有不同的权重,边最少的路径,不一定是权重和最小的,所以路径中边的条数已经没有意义了。
首先,我们需要用到 图的 BFS 遍历 中第三种代码实现,让 BFS 算法关注路径的权重和而不是边的数量。
另外,我们需要优先扩散权重和最小的路径,最先到达终点的路径就是权重和最小的路径。这就是贪心思想的体现,在讲代码实现时我们会进行数学证明。
如何优先扩散权重和最小的路径呢?借助 优先级队列 把权重小的路径排前面,优先级队列的逻辑是每次出队权重最小的节点,最先到达终点的路径就是权重和最小的路径。
对比标准 BFS 算法,只需修改两个地方即可得到 Dijkstra 算法:
1、标准 BFS 算法使用普通队列,Dijkstra 算法使用优先级队列。
2、标准 BFS 算法使用一个 visited 数组记录访问过的节点,确保算法不会陷入死循环;Dijkstra 算法使用一个 distTo 数组,确保算法不会陷入死循环,同时记录起点到其他节点的最短路径。
对于初学者来说,上面的描述可能有点抽象,不过不用担心,你现在只需要知道 Dijkstra 算法就是 BFS 算法的变种就行了。具体的代码实现和例题参见 Dijkstra 算法详解。
A* 算法简介
对于任意节点 x,我们用 g(x) 表示从起点 src 到节点 x 的距离,用 h(x) 表示启发函数,用于估计从节点 x 到终点 dst 的距离。那么 Dijkstra 算法就是借助优先级队列,让 g(x) 最小的节点先出队,从而保证终点第一次出队时,就找到了最短路径。
而 A* 算法中稍作了一点改动:让 f(x)=g(x)+h(x) 最小的节点优先出队,终点第一次出队时,就找到了最短路径。
仔细想想,f(x) 函数虽然简单,却非常精妙:
无论是接近终点还是远离终点,g(x) 肯定是不断增大的。 但是接近终点时,h(x) 会逐渐减小;远离终点时,h(x) 会逐渐增大。 也就是说,接近终点时 f(x) 会变小,节点更容易出队,算法也就会优先向终点的方向进行搜索;反之,远离终点时 f(x) 会变大,搜索的优先级就会降低。
只需要稍微修改 Dijkstra 算法的代码即可得到 A* 算法的代码,具体实现及应用场景会在后面的章节介绍。
Bellman-Ford/SPFA 算法简介
当说到包含负权重边的最短路径问题是,经常提到 Bellman-Ford 算法和 SPFA 算法(Shortest Path Faster Algorithm)。
这里有必要先澄清一下:当我们说 Bellman-Ford 算法时,一般是指 朴素 Bellman-Ford 算法;当我们说 SPFA 算法时,是指对朴素 Bellman-Ford 算法的一种优化,即 基于队列的 Bellman-Ford 算法。
这里仅介绍 SPFA 算法,因为可以通过标准 BFS 算法推导出来。朴素 Bellman-Ford 算法会在讲解代码实现时再介绍。
对比标准的 BFS 算法,SPFA 算法只有一个地方不一样:
标准 BFS 算法使用一个布尔数组 visited 确保每个节点只会遍历一次,避免算法陷入死循环;SPFA 算法中,需要使用 inQueue, count 数组配合,确保算法不会陷入死循环,同时用一个 distTo 数组记录起点到其他节点的最短路径。
对于初学者来说,上面的描述可能也有点抽象。不过不用担心,你现在只需要知道 SPFA 算法就是 BFS 算法的变种就行了。具体的代码实现和例题会更新在数据结构设计章节。
Floyd 算法简介
Floyd 算法是求解多源最短路径问题的经典算法,它的核心思想是 动态规划,和前面讲的基于 BFS 算法的单源最短路径算法完全不同。
在这个章节肯定没办法给初学者彻底讲清楚 Floyd 算法的原理,只能尽量描述一下这个算法的思路。
假设图中节点 i 和节点 j 之间存在最短路径,应该如何计算节点 i 到节点 j 的最短路径呢?
如果节点 i 和节点 j 之间有直接相连的边,那么节点 i 到节点 j 的最短路径就是这条边的权重。
如果节点 i 和节点 j 之间没有直接相连的边,那么肯定要经过至少 1 个其他节点。
对于任意一个其他节点 k,如果最短路径经过 k,那么节点 i 到节点 j 的最短路径就是节点 i 到节点 k 的最短路径加上节点 k 到节点 j 的最短路径。
这样一来,原问题「i 到 j 的最短路径」就变成了两个结构相同,规模更小的子问题「i 到 k 的最短路径」和「k 到 j 的最短路径」,这就是动态规划的特征,我们将根据这个思路来推导转移方程。
是不是对上面的描述有些懵圈?不必担心,虽然 Floyd 算法的核心代码只有 3 行,但状态转移方程确实不容易理解, Floyd 算法原理及应用 中会详细讲解。