二叉搜索树的应用及可视化
一句话总结
二叉搜索树是特殊的二叉树结构,其主要的实际应用是 TreeMap 和 TreeSet。
前文几种常见的二叉树类型 介绍二叉搜索树,接下来我会带你亲自实现一个类似 Java 标准库的 TreeMap 和 TreeSet 结构,帮助你知行合一。
不过呢,考虑到本文还处在数据结构基础的章节,本文仅讲解 TreeMap/TreeSet 的原理,动手实现 TreeMap/TreeSet 我放到了二叉树系列习题的后面。
因为和前面的哈希表、队列这些数据结构不同,树相关的数据结构需要比较强的递归思维,难度会上一个层级。如果你对递归的理解不够深入,现在给你讲的话不仅学习曲线有些陡峭,而且意义不大,就算你费了半天劲看懂了,遇到实际的题目还是不会,这很打击信心。
所以我建议循序渐进,后面二叉树的习题章节,用 100 多道实际的算法题手把手带你培养递归思维。刷完后你就可以秒杀所有二叉树相关的算法题了,再去看树相关的数据结构实现,就会感觉非常简单。甚至你都不用看我的代码,自己凭感觉就能实现 TreeMap/TreeSet。
好了,废话不多说,让我们开始吧。
二叉搜索树的优势
前文 几种常见的二叉树类型 介绍过二叉搜索树(BST)的特点,即左小右大:
对于树中的每个节点,其左子树的每个节点的值都要小于这个节点的值,右子树的每个节点的值都要大于这个节点的值。
比方说下面这棵树就是一棵 BST:
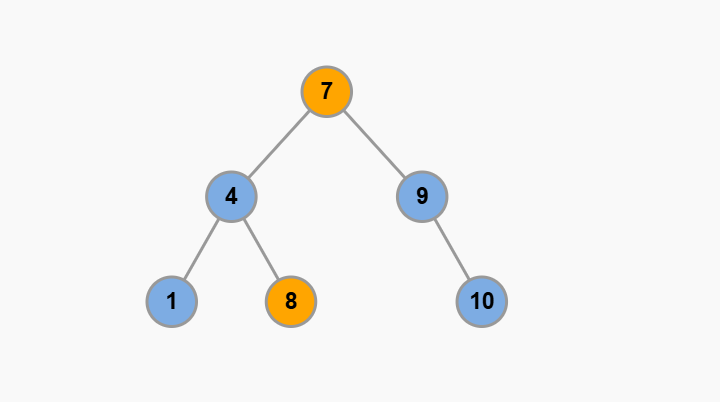
这个左小右大的特性,可以让我们在 BST 中快速找到某个节点,或者找到某个范围内的所有节点,这是 BST 的优势所在。
你应该已经学过前文 二叉树的遍历,下面用标准的二叉树遍历函数结合可视化面板来对比展示一下 BST 和普通二叉树的操作差别。
这里展示的是查找目标元素的场景,可以看到,利用 BST 左小右大的特性,可以迅速定位到目标节点,理想的时间复杂度是树的高度 O(logN),而普通的二叉树遍历函数则需要 O(N) 的时间遍历所有节点。
至于其他增、删、改的操作,你首先查到目标节点,才能进行增删改的操作对吧?增删改的操作无非就是改一改指针,所以增删改的时间复杂度也是 O(logN)。
TreeMap/TreeSet 实现原理
你看 TreeMap 这个名字,应该就能看出来,它和前文介绍的
哈希表 HashMap 的结构是类似的,都是存储键值对的,HashMap 底层把键值对存储在一个 table 数组里面,而 TreeMap 底层把键值对存储在一棵二叉搜索树的节点里面。
至于 TreeSet,它和 TreeMap 的关系正如哈希表 HashMap 和哈希集合 HashSet 的关系一样,说白了就是 TreeMap 的简单封装,所以下面主要讲解 TreeMap 的实现原理。
力扣经典的 TreeNode 结构长这样:
type TreeNode struct {
Val int
Left *TreeNode
Right *TreeNode
}
我们只要改一改这个经典的 TreeNode 结构,就可以用来实现 TreeMap 了:
type TreeNode struct {
Key interface{}
Value interface{}
Left *TreeNode
Right *TreeNode
}
我们将实现的 TreeMap 结构有如下 API:
// TreeMap 主要接口
class MyTreeMap<K, V> {
// ****** Map 键值映射的基本方法 ******
// 增/改,复杂度 O(logN)
public void put(K key, V value) {}
// 查,复杂度 O(logN)
public V get(K key) {}
// 删,复杂度 O(logN)
public void remove(K key) {}
// 是否包含键 key,复杂度 O(logN)
public boolean containsKey(K key) {}
// 返回所有键的集合,结果有序,复杂度 O(N)
public List<K> keys() {}
// ****** TreeMap 提供的额外方法 ******
// 查找最小键,复杂度 O(logN)
public K firstKey() {}
// 查找最大键,复杂度 O(logN)
public K lastKey() {}
// 查找小于等于 key 的最大键,复杂度 O(logN)
public K floorKey(K key) {}
// 查找大于等于 key 的最小键,复杂度 O(logN)
public K ceilingKey(K key) {}
// 查找排名为 k 的键,复杂度 O(logN)
public K selectKey(int k) {}
// 查找键 key 的排名,复杂度 O(logN)
public int rank(K key) {}
// 区间查找,复杂度 O(logN + M),M 为区间大小
public List<K> rangeKeys(K low, K high) {}
}
除了标准的增删查改方法 get, put, remove, containsKey 之外,TreeMap 还提供了很多额外方法,主要和 key 的大小相关。怎么样,是不是感觉很强大?
哈希表很实用,但是它确实没办法很好地处理键之间的大小关系。前文用链表加强哈希表 中实现的 LinkedHashMap 也只是做到按「插入顺序」排列哈希表中的键,依然做不到按「大小顺序」排列。
下面简单介绍一下 TreeMap 的每个方法的实现原理,具体的代码在后文 TreeMap/TreeSet 的实现 细说。
基本增删查改
首先,get 方法其实就类似上面可视化面板中查找目标节点的操作,根据目标 key 和当前节点的 key 比较,决定往左走还是往右走,可以一次性排除掉一半的节点,复杂度是 O(logN)。
至于 put, remove, containsKey 方法,其实也是要先利用 get 方法找到目标键所在的节点,然后做一些指针操作,复杂度都是 O(logN)。
floorKey, ceilingKey 方法是查找小于等于/大于等于某个键的最大/最小键,这个方法的实现和 get 方法类似,唯一的区别在于,当找不到目标 key 时,get 方法返回空指针,而 ceilingKey, floorKey 方法则返回和目标 key 最接近的键,类似上界和下界。
rangeKeys 方法输入一个 [low, hi] 区间,返回这个区间内的所有键。这个方法的实现也是利用 BST 的性质提高搜索效率:
如果当前节点的 key 小于 low,那么当前节点的整棵左子树都小于 low,根本不用搜索了;如果当前节点的 key 大于 hi,那么当前节点的整棵右子树都大于 hi,也不用搜索了。
firstKey, lastKey 方法
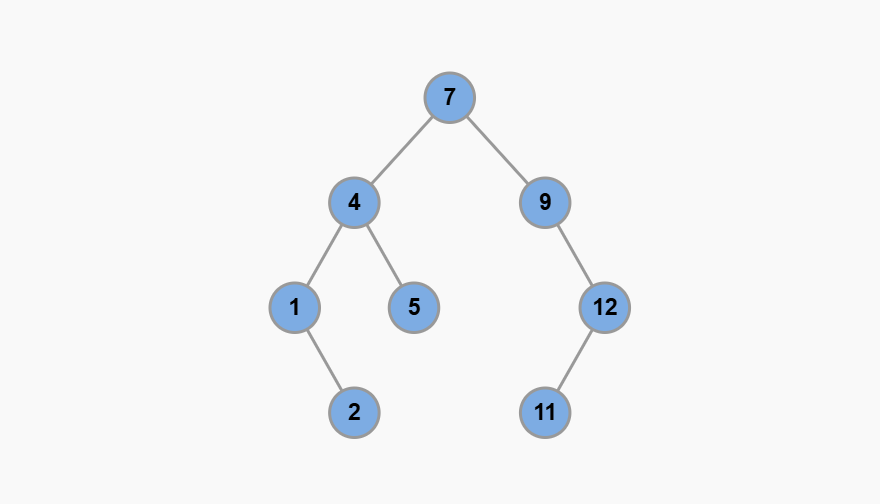
firstKey 方法是查找最小键,lastKey 方法是查找最大键,借助 BST 左小右大的特性,非常容易实现:
从 BST 的根节点开始,一直往左走,最后遇到的非空节点就是最小的节点;同理,一直往右走,最后遇到的非空节点就是最大的节点。
你看看是不是这样,1 是最小的节点,12 是最大的节点:
keys 方法
keys 方法返回所有键,且结果有序。可以利用 BST 的中序遍历结果有序的特性。
selectKey, rank 方法
这两个方法比较有意思。其中 selectKey 方法是查找排名为 k 的键(从小到大,从 1 开始),rank 方法是查找目标 key 的排名。
比如下面这棵 BST,selectKey(3) 返回 5,因为元素 5 的大小排在第三;rank(10) 返回 6,因为元素 10 的排名是第六。
keys [1, 4, 5, 7, 9, 10]
rank 1 2 3 4 5 6
先说 selectKey 方法,一个容易想到的方法是利用 BST 中序遍历结果有序的特性,中序遍历的过程中记录第 k 个遍历到节点,就是排名为 k 的节点。
但是这样的时间复杂度是 O(k),因为你至少要用中序遍历经过 k 个节点。
一个更巧妙的办法是给二叉树节点中新增更多的字段记录额外信息:
class TreeNode<K, V> {
K key;
V value;
// 记录以当前节点为根的子树的节点总数(包含当前节点)
int size;
TreeNode<K, V> left;
TreeNode<K, V> right;
TreeNode(K key, V value) {
this.key = key;
this.value = value;
this.size = 1;
}
}
keys [1, 4, 5, 7, 9, 10]
rank 1 2 3 4 5 6
size 1 3 1 6 2 1
这样一来,selectKey 就可以利用这个 size 字段把时间复杂度降到 O(logN) 了。
因为 size 维护的就是当前节点为根的整棵树上有多少个节点,加上 BST 左小右大的特性,那么对于根节点,它只需要查询左子树的节点个数,就知道了自己在以自己为根的这棵树上的排名;知道了自己的排名,就可以确定目标排名的那个节点存在于左子树还是右子树上,从而避免搜索整棵树。
比方说上面的例子,你调用 selectKey(3) 找排名第三的节点,根节点 7 查看左子节点 4 得知左子树共有 3 个节点,加上自己共有 4 个节点,那么 7 就知道自己排名第四。
由此可知,排名第三的节点在 7 的左子树,就不用再往右子树找了。类似的,如果你调用 selectKey(5) 找排名第五的节点,7 就知道要往右子树找。
再说 rank 方法,也可以利用这个 size 字段。比方说你调用 rank(9),想知道节点 9 这个元素排名第几,根节点 7 知道左子树有 3 个节点,加上自己共有 4 个节点,即自己排名第 4;然后 7 可以去右子树递归调用 rank(9),计算节点 9 在右子树中的排名,最后再加上 4,就是整棵树中节点 9 的排名:
rank(node(7), 9) = 3 + 1 + rank(node(9), 9) = 3 + 1 + 1 = 5
当然,这样也提高了维护的复杂性,因为每次插入、删除节点都要动态地更新这个额外的 size 字段,确保它的正确性。
性能问题
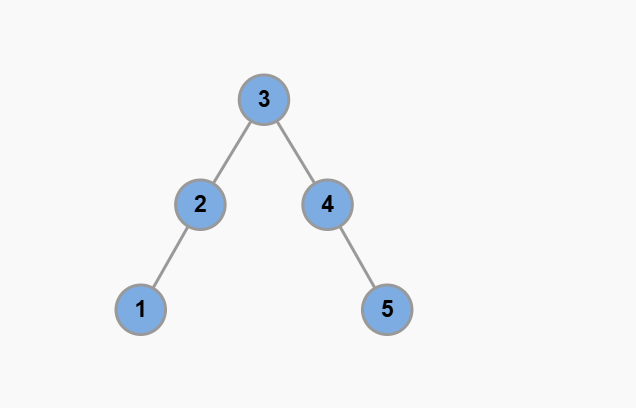
前文说复杂度是树的高度 O(logN)(N 为节点总数),这是有前提的,即二叉搜索树要是「平衡」的,也就是左右子树的高度差不能太大,比如这样:
可以直观地感觉到这棵树比较平衡,假设树中节点总数为 N,那么树的高度是 O(logN)。
如果搜索树不平衡,比如这种极端情况,所有节点都只有右子树,没有左子树:
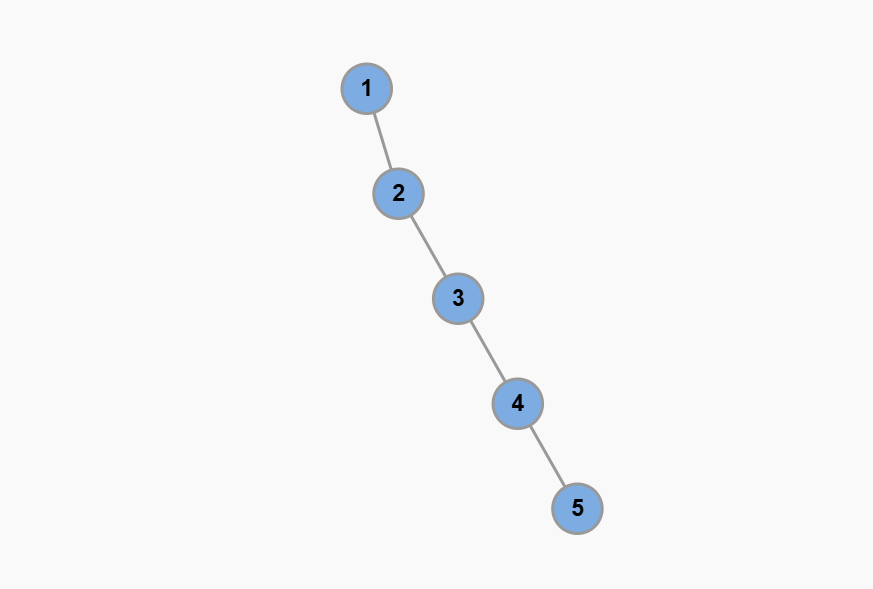
这样二叉搜索树其实退化成了一条单链表,树的高度等于节点数 O(N),这种情况下,即便这棵树符合 BST 的定义,但是性能就退化成了链表的性能,增删查改的复杂度全部变成了 O(N)。
可以这样说:二叉搜索树的性能取决于树的高度,树的高度取决于树的平衡性。因此,在实际应用中,TreeMap 需要自动维护树的平衡,避免出现性能退化。
如何自动维护平衡性?这可就复杂了。你需要在插入和删除二叉树节点的时候对树进行局部旋转操作,比方上面那棵退化成单链表的 BST,可以这样被旋转成平衡二叉树:
大家熟知的红黑树就是一类自平衡的二叉搜索树,它的平衡性能非常好,但是实现起来比较复杂,这就是完美所需付出的代价。
目前我们实现的 TreeMap 仅使用普通 BST 而不是实现红黑树。红黑树的实现目前还没有更新到网站
好了,本文就介绍这么多,上面只说了每个方法的实现思路,具体的代码实现在后文 TreeMap/TreeSet 的实现 细说,建议你循序渐进,按照本站目录顺序先完成
二叉树系列习题,再去学习 TreeMap 的代码。